CloudBot
Senior Design Engineering Capstone: CloudBot Autonomous Weather Balloon
Description
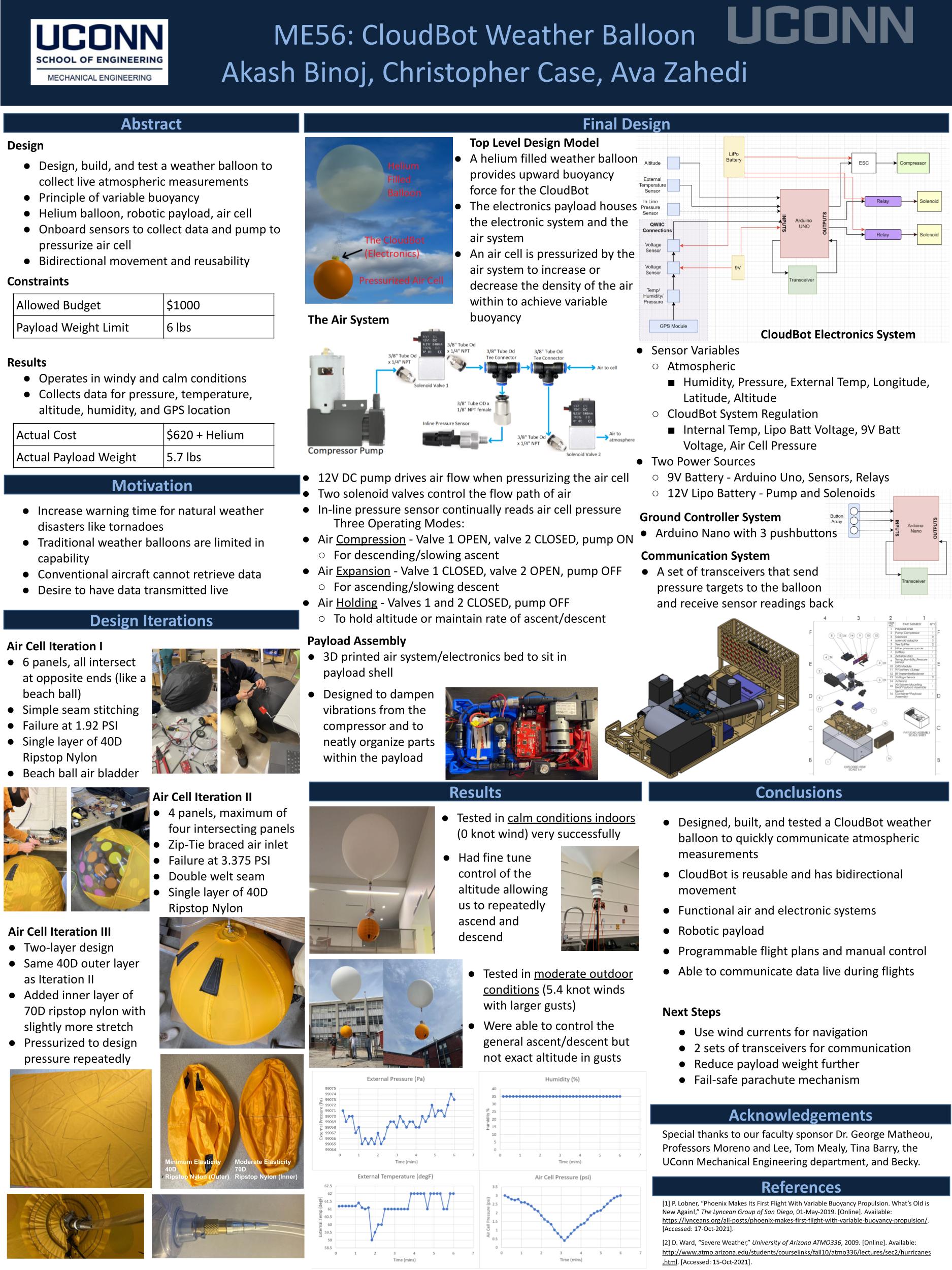
I and two other mechanical engineering seniors at UConn designed, built, and tested an autonomous weather balloon for our Senior Design capstone project. Our objective was to create a device capable of collecting live atmospheric measurements, particularly in storm conditions when conventional aircraft cannot. Our weather balloon operates on the principle of varying buoyancy and includes a payload containing electronics to help us achieve our mission.

How Does It Work?
The CloudBot uses variable buoyancy. The helium balloon provides an upwards force, and the air cell can have atmospheric air compressed into/out of it using our pump. By compressing air into the air cell, we can alter the density of the overall CloudBot. Pumping air inside increases density, causing the CloudBot to descend. Taking air out decreases density, allowing the CloudBot to ascend.
The CloudBot is composed of three parts: the helium-filled weather balloon (top), the payload (middle), and the air cell (bottom).
The Helium Balloon
- 20ft diameter, 600g
- Fixed amount of helium
- Custom valve connection, allowing us to fill and empty the balloon repeatedly
- Reusable
The Payload
- Houses air and electronics systems
- Pump
- Atmospheric sensors: external temperature, pressure, humidity, altitude, and longitude & latitude (GPS)
- System regulation: internal temperature, LiPo battery voltage, 9V battery voltage, air cell pressure
- Suspended 4ft below helium balloon
- 3D-printed bed designed to fit our pump, sensors, and tubing in a compact manner
The Air Cell
- 42” diameter beach ball acting as an air bladder
- 2 layers of ripstop nylon casing, sewed in a custom pattern
- Fixes the maximum volume of the air cell so that it can hold pressure when compressing air into it
Our Results
We had successful tests in both calm, indoor conditions as well as in moderately windy outdoor conditions. In both, we demonstrated the operating principle of variable buoyancy, though in the outdoor tests it was more difficult to control movement due to wind. We were also able to collect live measurements during the test flights and transmit them to ground control. All in all, we accomplished the task we set out to do in September 2021, and as a team we are very pleased with the final results we reached in May 2022.