Gesture-Based Quadruped Control
Description
In this project, I developed software that uses hand gestures to send motion commands to the Unitree Go1 robot dog.
The go1-gesture-command repository consists of two ROS2 packages, one Python and one C++.
Packages
-
The ros2_hgr package includes nodes for hand gesture recognition and sending commands to the Unitree Go1 robot dog.
-
The go1_cmd package includes a node for receiving gesture data and converting them to movement commands for the Go1.
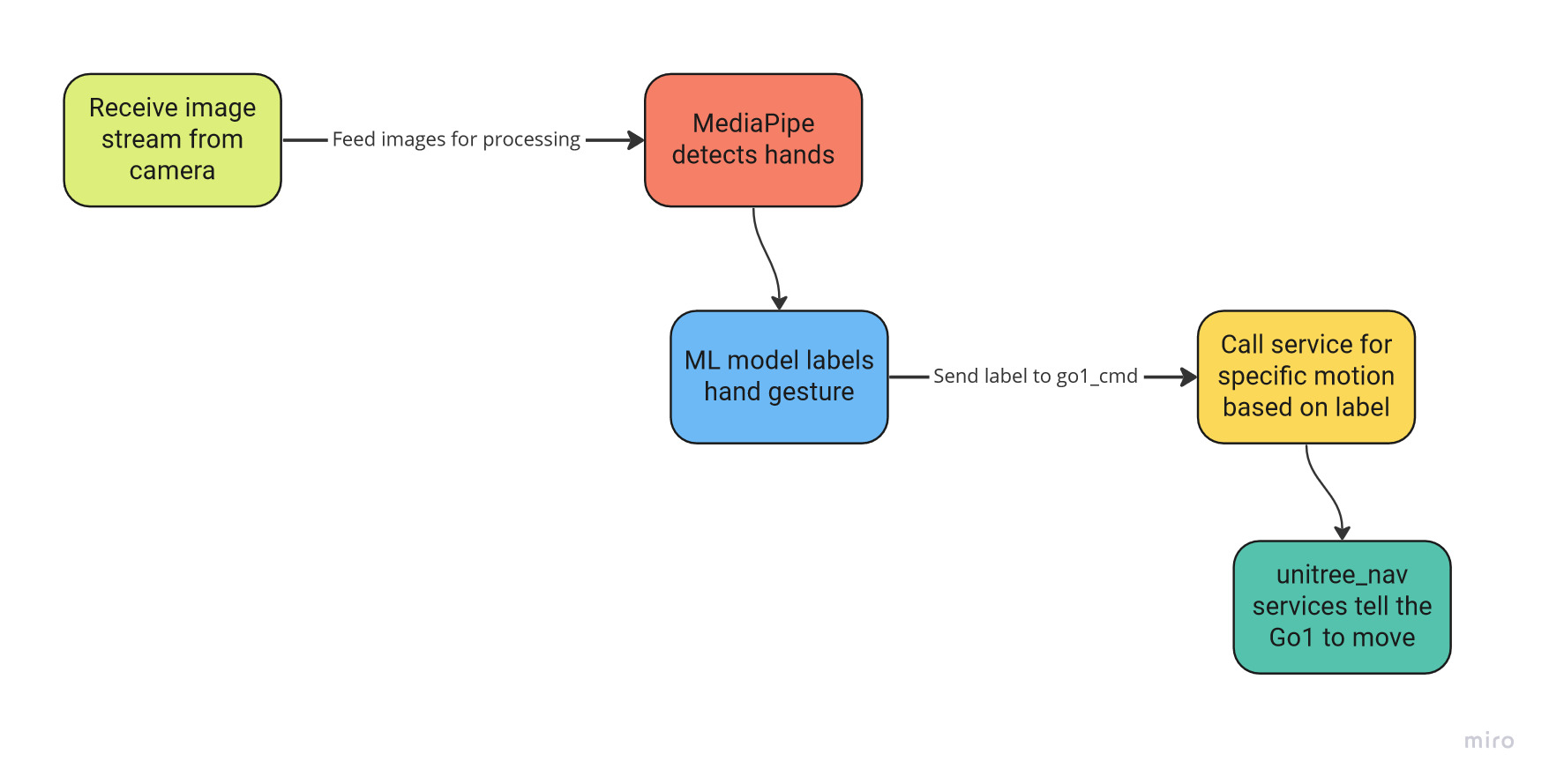
How It Works
Project Flowchart
Hand Gesture Recognition
Gestures Guide
- Open - stop
- Close - look forward (normal 0° yaw)
- Pointer - recover stand up
- OK - look up
- Peace - look down
- Thumbs Up - walk forward
- Thumbs Down - walk backward
- Quiet Coyote - lay down
I forked a repository from GitHub user Kinivi that includes a program and TensorFlow model for using MediaPipe to detect and label hand gestures. In my ros2_hgr package, I transformed their code into a ROS2 Python package that can publish data through a node. I also added new gestures (gestures 4-7) and retrained the model with new data for both the existing gestures and the new ones.
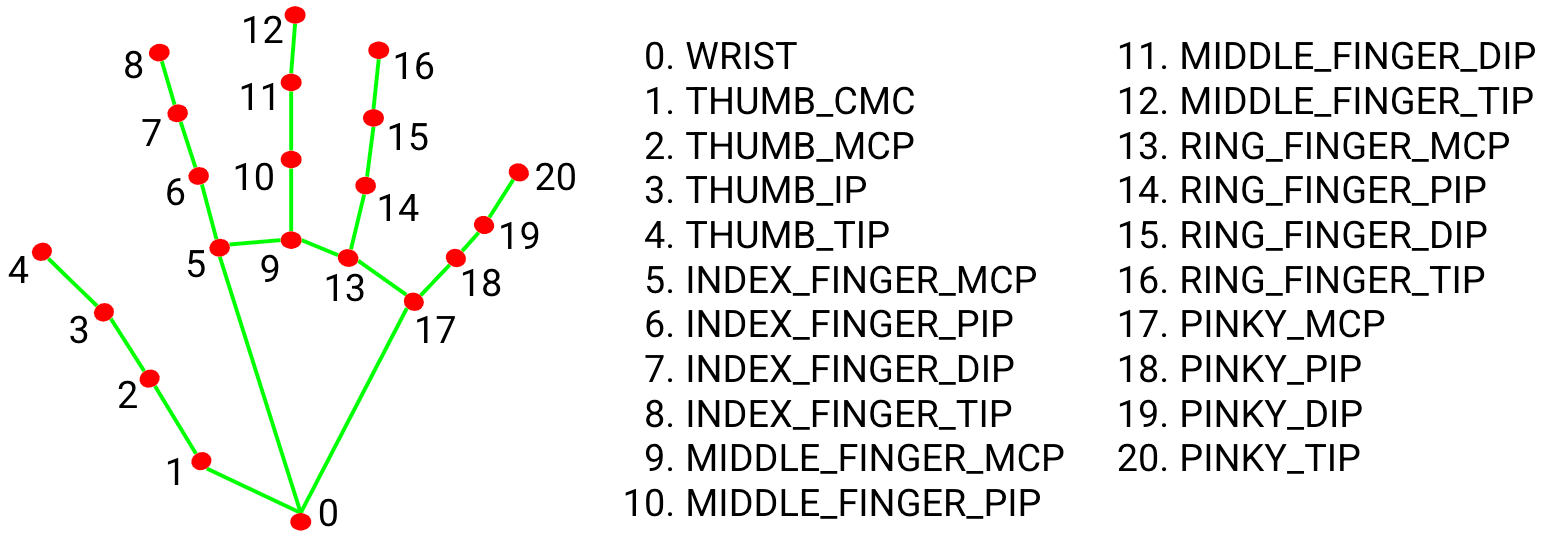
MediaPipe Hand Landmarks
Here, MediaPipe works by detecting 21 points throughout a hand. The model I use in this project identifies the locations of each of these points and, based on their overall configuration, labels the gesture.
Commanding the Go1
In another node, I receive the hand gesture labels and use them to send out a variety of commands to the Go1, employing the unitree_ros2 and unitree_nav packages mentioned in the prerequisites section.
The following video shows some movements that come pre-programmed and can be controlled via the provided remote control.
About the Unitree Go1
The Unitree Go1 is a quadruped robot advertised for its high dynamics, intelligence, and companionship abilities.
Notes
A large part of getting the Go1 up and running with Ubuntu 22.04 and ros2-humble consisted of the disassembly and updates performed as a group with other students with projects involving the Go1: Marno Nel, Nick Morales, and Katie Hughes.